روش های کنترل دور موتور DC
درایو کنترل دور موتور های DC باعث ایجاد امکانات مختلفی در استفاده بهینه از این نوع موتورها میشود. از طریق تغییر اتصالات در سیمهای پیچ میدان، قابلیت دقیق و کارآمدی برای تنظیم گشتاور، سرعت، و ولتاژ جریان در موتورهای DC فراهم میشود. این انعطافپذیری در کنترل موتورهای DC به اپراتوران امکان میدهد تا بر اساس نیازهای خاص خود، عملکرد این موتورها را بهینهسازی کرده و به بهرهوری بیشتری دست یابند.
موتورهای DC بهخصوص در حوزه حملونقل و سیستمهای مترو بهعنوان یک قطب اساسی در انجام وظایف مختلف از جمله حرکت و توقف سریع و دقیق خودروها و قطارها، جایگاه ویژهای دارند. این موتورها به دلیل قابلیت تنظیم و کنترل دقیق اجزای مختلف، مانند گشتاور و سرعت، در این نواحی بسیار مورد استفاده قرار میگیرند. همچنین، موتورهای DC کوچک در سیستمهای کنترل، اتوماسیون، و رباتیک بهطور گستردهای از آنها بهرهمند میشوند.
با توجه به توانائیها و انعطافپذیری موتورهای DC در کنترل دقیق، میتوان انتظار داشت که در آینده این تکنولوژی بهطور گستردهتری در صنایع مختلف بهکار گرفته شود. توسعه و بهرهمندی از این راههای کنترل به منظور افزایش کارایی و کاهش هزینهها در تولید و اجرای پروژههای مختلف، از اهمیت بسیاری برخوردار است.
موتور DC چیست؟
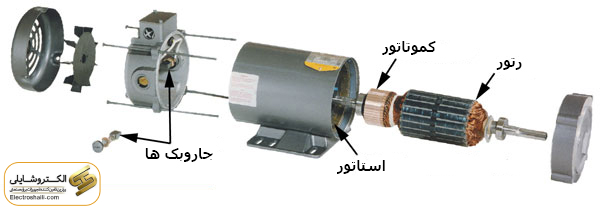
موتور DC یک ابزار فوقالعاده است که در بسیاری از کاربردها از جمله صنایع مختلف و حمل و نقل استفاده میشود. این موتورها، همانند دیگر ماشینهای گردان، از یک استاتور و یک روتور تشکیل شدهاند. در واقع، ساختار اصلی یک موتور DC در شکل زیر بهخوبی قابل مشاهده است.
موتور DC یا جریان مستقیم، یکی از انواع موتورهای الکتریکی است که با استفاده از جریان برق DC به حرکت در میآید. این نوع موتور با گذراندن جریان از سیمهای پیچ، یک میدان مغناطیسی در اطراف آنها ایجاد میکند. تعامل این میدان با میدان مغناطیسی موجود در استاتور، که توسط آهنربای دائم یا الکترومغناطیسی تولید شده است، باعث ایجاد نیرو در آرمچر میشود و موتور را چرخانده میکند. برای ادامه این فرآیند و حرکت، جهت جریان الکتریکی در هر سیکل باید برعکس شود تا نیرویی بین سیمهای پیچ و آهنربا ایجاد شود
استاتور این موتورها از یک سیمبندی میدانی ساخته شده است که بهطور پیچیده در اطراف قطبهای استاتور واقع درون یک یوک استوانهای قرار دارد. این یوک و قطبها اغلب از ورقههای فولادی با ضخامت ۰.۵ تا یک میلیمتر تهیه میشوند. برای ایجاد توزیع بهینهی شار مغناطیسی در فضای هوایی، از کشک قطب در فاصلههای هوایی استفاده میشود.
بخش اصلی روتور نیز از اجزای مهمی چون سیمبندی آرمیچر، هسته آرمیچر، کموتاتور مکانیکی، و شفت روتور تشکیل شده است. این اجزا به هماهنگی کامل با یکدیگر عمل کرده و به موتور DC امکان حرکت و عملکرد بهینه را میدهند.
در همهی کاربریهای موتورها، از صنعت تا پروژههای آموزشی، ما با کنترل سرعت موتور DC سر و کار داریم. به طور کلی، سرعت موتور با سه عامل زیر ارتباط دارد:
- نسبت مستقیم با ولتاژ تغذیه:
سرعت موتور به طور مستقیم با ولتاژ تغذیه آن ارتباط دارد. افزایش ولتاژ تغذیه منجر به افزایش سرعت موتور میشود.
- نسبت عکس با افت ولتاژ:
هنگامی که ولتاژ تغذیه کاهش یابد، سرعت موتور افت میکند. این ارتباط عکسالعملی بین افت ولتاژ و سرعت موتور را نشان میدهد.
- نسبت معکوس با شار میدان مغناطیسی:
شار میدان مغناطیسی نیز بر عملکرد سرعت موتور تأثیرگذار است. افزایش شار میدان مغناطیسی منجر به کاهش سرعت موتور میشود، و بالعکس.
کموتاتور چیست؟
کموتاتور، یک عنصر بسیار اساسی و کلیدی در ساختار موتورهای DC محسوب میشود. این قطعه به شکل یک حلقه استوانهای با شکاف به آرمیچر متصل میشود؛ بهعبارت دیگر، هر بخش از این حلقه به انتهای هر یک از سیمپیچهای آرمیچر اتصال دارد. کموتاتور در کنترل جریان در سیمپیچهای آرمیچر بهمنظور تولید گشتاور مسئولیت دارد.
این دو سرکلف حلقه دارای اهمیت بسیار زیادی در نقشهی الکتریکی موتور دارند؛ از حلقههای کموتاتور به عنوان مسیرهای الکتریکی برای جریان استفاده میشود و از شفت روتور تغذیه میگیرد. این حلقهها از هادیهای فلزی و شفاف برای توزیع بهینهی شار مغناطیسی بهره میبرند.
دو سیمپیچ مختلف در حلقههای کموتاتور، کلید مهمی در انتقال جریان الکتریکی از یک سرکلف به سرکلف دیگر هستند. این سیمپیچها از جنس هادیهای متفاوت و با شفافیت متغیر ساخته شدهاند، و در نقاطی از دور قطبها قرار دارند که به بهترین شکل جریان الکتریکی را انتقال دهند. تنظیم دقیق این سیمپیچها و ارتباط آنها با جاروبکها، عاملی موثر در عملکرد بهینه کموتاتور میباشد.
کموتاسیون
کموتاسیون، یک عنصر حیاتی در عملکرد موتورهای DC محسوب میشود. در این فرآیند، آرمیچر متصل به کموتاتور، جریان الکتریکی را از دور حلقهای سیمپیچ در موتور انتقال میدهد. جاروبکهای موجود در این حلقه، نقش مهمی در ایجاد ارتباط الکتریکی با آرمیچر و تأمین جریان به روتور دارند. این پروسه از دقت بالایی برخوردار بوده و تأثیر مستقیم بر عملکرد موتور دارد.
در حین این کموتاسیون، رفتار جریان کلاف تحت تأثیر عوامل مختلفی قرار میگیرد. تغییرات در مقاومت اتصال جاروبک، emf مرتبط با اندوکتانسهای خودی و متقابل که با تغییر جریان مخالفت میکند، و همچنین emf مرتبط با عکس العمل آرمیچر در حالت ایدهآل وقتی که روتور با سرعت ثابت میچرخد، تأثیرگذار هستند. اگر جریان کلاف با یک نرخ ثابت تغییر کند، چگالی جریان زیر جاروبک در فرآیند کموتاسیون به طور یکنواخت حفظ خواهد شد. این پروسه اساسی در حفظ عملکرد بهینه موتورهای DC موثر است.
به منظور کنترل دور موتور DC، میتوانیم از سه روش مختلف استفاده کنیم که به بهبود عملکرد و کارایی آن کمک میکنند:
- تغییر شار و جریان از طریق سیم پیچ میدان
- تغییر ولتاژ و مقاومت سیم پیچ
- تغییر ولتاژ تغذیه
روش تغییر شار در کنترل دور موتور DC
استفاده از روش تغییر شار، یکی از راهکارهای پیشرفته برای مدیریت دقیق دور موتور DC است. این روش اصلی بر اساس تنظیم جریان عبوری از سیم پیچ میدان و تغییر در مقدار شار مغناطیسی موتور است. با تغییر این جریان، میتوان مقدار شار را بهبود داد و بر این اساس سرعت موتور را کنترل کرد.
برای اجرای این روش، ابتدا یک مقاومت متغیر به صورت سری با مقاومت سیم پیچ وارد میشود. هنگامی که مقاومت متغیر در حداقل خود قرار میگیرد، جریان به دلیل اختلاف ولتاژ منبع تغذیه از سیم پیچ میدان عبور میکند و سرعت موتور به صورت معمولی حفظ میشود. با افزایش مقاومت، جریان کاهش مییابد و شار تولید شده کاهش یافته و سرعت موتور افزایش مییابد. این روند باعث کنترل دقیق دور موتور DC میشود.
در شکل زیر، مدار کنترل دور موتور DC با استفاده از این روش به طور دقیق نشان داده شده است. این روش علاوه بر بهبود عملکرد، انعطافپذیری بالایی در کنترل سرعت موتور فراهم میکند.

روش تغییر مقاومت سیم پیچ
استفاده از روش تغییر مقاومت سیم پیچ، یک راهکار هوشمندانه برای مدیریت افت ولتاژ در مدار میباشد که با این اقدام، قابلیت کنترل دقیق سرعت موتور DC را فراهم میکند. این روش از یک مقاومت متغیر به صورت سری با آرمیچر استفاده میکند، که با تنظیم میزان مقاومت، امکان کنترل مستقیم بر روی ولتاژ در سیم پیچ را فراهم میسازد.
در این روش، با افزایش تدریجی مقاومت متغیر، ولتاژ در سرتاسر سیم پیچ گسترش یافته و این اقدام منجر به کاهش سرعت موتور میشود. این تغییرات دقیق و کنترل شده به این امکان میپیوندد که سرعت موتور DC به صورت ایدهآل و مطابق با نیازهای کاربردی تنظیم گردد. شمای مدار کنترل دور موتور DC با استفاده از این روش در شکل زیر به تفصیل نمایش داده شده است.

روش تغییر ولتاژ در کنترل دور موتور DC
در این روش، سیم پیچ میدان ولتاژ ثابتی دریافت میکند، در حالی که آرمیچر به ولتاژ متغیری تحت واقع میشود. از طریق این روش و با بهرهگیری از تکنیک PWM (Pulse Width Modulation)، میتوان مقدار ولتاژ در ترمینالهای موتور را با دقت کنترل کرد.
کنترل دور موتور DC با استفاده از PWM:
در روش PWM، با تغییر پهنای مختلف پالسها به درایور موتور، ولتاژی که به موتور اعمال میشود، به دقت کنترل میشود. این روش به دلیل کاهش تلفات برق و عدم نیاز به تجهیزات پیچیده، به عنوان یک راهکار بسیار کارآمد در کنترل دور موتور DC محسوب میشود.
عملکرد PWM:
PWM یا Pulse Width Modulation با تغییر پهنای پالسهای اعمال شده به ترمینالهای موتور، سرعت چرخش آن را کنترل میکند. با تغییر عرض پالسها، میتوان توان وارده به موتور را تنظیم نمود. به عنوان مثال، با افزایش عرض پالسها، ولتاژ متوسط وارده به ترمینالهای موتور افزایش مییابد، شار مغناطیسی درون سیم پیچهای آرمیچر تقویت شده و موتور با سرعت بیشتری چرخش مییابد.
مزایای مدیریت دقیق با PWM:
در روش کنترل دور موتور DC با استفاده از PWM، انتخاب یک فرکانس مناسب و ثابت میسر میشود. هنگامی که نیاز به افزایش سرعت موتور باشد، دوره کاری را افزایش داده و در صورت نیاز به کاهش سرعت، دوره کاری را کاهش داده میشود. این عملیات با استفاده از ماژول کنترل دور موتور DC به سادگی قابل انجام است.
کنترل سرعت موتور DC با استفاده از دیمر
دیمر یک سیستم الکترونیکی ساده است که قادر است ولتاژ موثر را کاهش دهد و در کنترل دور موتور DC مورد استفاده قرار بگیرد. این روش، با ویژگیهایی از جمله سادگی و هزینه کم مشخص میشود، اما در کنترل سرعت موتور DC کارایی بالایی ارائه نمیدهد. مهمترین مزیت دیمر این است که با این که ساده و ارزان است، اما به علت نویز، اعوجاج و تلفات حرارتی، ممکن است عمر موتور را کاهش دهد.
دیمرها با استفاده از ترایاک و دیاک که توانایی عبور جریان در شرایط خاص را دارند، میتوانند در کنترل دور فن یا دستگاههای دیگر از این نوع موثر باشند. در واقع، ترایاک قادر به مسدود کردن بخشی از موج متناوب ولتاژ ورودی است و دیمر به صورت سری با مصرفکننده قرار گرفته و ولتاژ ورودی را کنترل میکند.
بطور کلی، برای کنترل سرعت موتور DC، نسبت ولتاژ به فرکانس (v/f) باید ثابت باقی بماند، در حالی که دیمرها تنها قادر به محدود کردن ولتاژ هستند و تغییری در فرکانس ایجاد نمیکنند. به همین دلیل، این محصولات برای کنترل دور موتورهای DC بهطور کامل مناسب نمیباشند.
کنترل سرعت موتور DC با استفاده از میکروکنترلر
یکی از روشهای پیشرفته برای کنترل سرعت موتور DC، استفاده از میکروکنترلرها و ماژولهای کنترل مخصوص سرعت موتور DC است. این تکنولوژی امروزه به دلیل عملکرد بهتر خود نسبت به دیمرها، به عنوان یک راهکار مؤثر و پیشرفته در کنترل سرعت موتورهای DC شناخته میشود. برخلاف دیمرها که در عمدتاً محیطهای آموزشی و آزمایشگاهی مورد استفاده قرار میگیرند، میکروکنترلرها به دلیل قابلیتها و امکانات گستردهتر، در صنایع مختلف نیز کاربرد فراوان دارند.
استفاده از ماژول کنترل دور موتور DC، این امکان را به کاربر میدهد تا بهطور دقیق و کارآمد کنترل سرعت موتور DC را انجام دهد. این ماژولها با توجه به نیازهای مختلف، در انواع پروژههای آموزشی، تحقیقاتی و صنعتی مورد استفاده قرار میگیرند. بنابراین، از طریق بهرهگیری از ماژول کنترل دور موتور DC، کاربران میتوانند بهصورت کامل و اثربخش کنترل سرعت موتور خود را داشته باشند.
انواع موتورهای DC
در ادامه با انواع موتورهای DC آشنا خواهیم شد.
موتور DC با جاروبک (Brushed Motor)
در این نوع موتورها، میدان مغناطیسی در رتور سیمپیچی از طریق عبور جریان از کموتاتور و جاروبک ایجاد میشود. این موتورها به عنوان گزینههای معمولی در برنامههای مختلف از جمله صنعتی، حمل و نقل، و الکترونیک استفاده میشوند.
موتور براشلس DC (BLDC)
در این نوع موتورها، هیچ گونه جاروبکی برای کموتاسیون به کار نمیرود. موتورهای BLDC به عنوان نمونههایی از موتورهای سنکرون شناخته میشوند، زیرا میدان مغناطیسی در استاتور و رتور به یک فرکانس همگام عمل میکنند. این نوع موتورها بدون وجود لغزش عمل میکنند و به عنوان گزینههای پیشرفته در برنامههایی که نیاز به عملکرد دقیق و بدون لغزش دارند، مورد استفاده قرار میگیرند.
موتورهای BLDC از سنسور اثر هال برای تولید میدان دوار در استاتور استفاده میکنند، که این امر باعث افزایش قیمت آنها میشود. عمل کموتاسیون در این نوع موتورها به صورت الکتریکی انجام میشود، که به آنها این امکان را میدهد تا به صورت دقیق و با کارایی بالا عملکرد کنند.
مزایای براشلس موتورهای DC
موتورهای براشلس DC (BLDC) به مقایسه با موتورهای ذغالی (دارای جاروبک) و موتورهای القایی، دارای مزایایی بینظیر هستند که به بهبود عملکرد و کارایی آنها کمک میکند:
- سرعت بهتر در برابر گشتاور مشخص:
موتورهای BLDC به دلیل عدم وجود جاروبک و سیستم کموتاسیون پیشرفتهتر، دارای سرعت بهتری نسبت به گشتاور مشخص هستند. این ویژگی مهم در برنامههایی که نیاز به تنظیم دقیق سرعت و گشتاور دارند، بسیار حائز اهمیت است.
- پاسخ دینامیکی بهتر:
موتورهای BLDC به عنوان موتورهای سنکرون، پاسخ دینامیکی بهتری دارند. این به معنای عدم وجود لغزش و پایداری بیشتر در تغییرات سریع سرعت و گشتاور است.
- راندمان بالاتر:
به دلیل ساختار بدون جاروبک و کموتاسیون الکتریکی پیشرفته، موتورهای BLDC دارای راندمان بالاتری هستند. این به کاهش اتلافهای انرژی و افزایش بهرهوری انرژی منجر میشود.
- رنج سرعت گسترده تر:
موتورهای BLDC رنج سرعت گستردهتری را ارائه میدهند، که به کاربران امکان تنظیم و انتخاب گشتاور و سرعت در محدوده وسیعی را میدهد.
با توجه به این مزایا، موتورهای براشلس DC به عنوان یک گزینه پیشرفته در صنایع مختلف، از جمله الکترونیک، صنعت خودرو و اتوماسیون، به کار گرفته میشوند.
موتورهای سروو
موتورهای سروو، از دسته موتورهای جاروبک دار DC هستند که در سیستمهای حلقه بسته با بهرهگیری از کنترل فیدبک موقعیت و اتصال به شفت رتور، به کار میروند. این نوع موتورها با استفاده از روش PWM (مدولاسیون پهنای پالس) دور موتور DC سروو را کنترل میکنند.
آرمیچر موتورهای سروو از ورقههای فولادی با ضخامت خاص ساخته شده است که در محل میدان مغناطیسی رتور قرار گرفته و از طریق حرکت در داخل شیارهای شفت روتور، گشتاور ایجاد میکند. این لایههای ورقهای در شیارهای شفت روتور به منظور کاهش افت انرژی و بهبود کارایی موتور به کار میروند.
مدلهای عملکرد ماشین الکتریکی
از نظر جریان انرژی، ماشین الکتریکی که در حال عمل است، نه تنها دارای ورودی و خروجی انرژی است، بلکه توانایی ذخیره انرژی مغناطیسی در میدان و همچنین انرژی جنبشی به شکل چرخشی را دارا میباشد. بر اساس جهت جریان انرژی، میتوان دو حالت عملکرد را تشخیص داد.
وقتی انرژی از منبع الکتریکی خارجی به پایانههای ماشین متصل شده و به انرژی مکانیکی تبدیل شده یا باعث افزایش انرژی جنبشی روتور شود، ما با عملکرد موتوری روبرو خواهیم شد. اگر انرژی مکانیکی حاصل از چرخش روتور به انرژی الکتریکی تبدیل شده و از طریق پایانههای ماشین به مدار خارجی جریان یابد، عملکرد ژنراتوری را دارا خواهیم بود.
تاسیسات موتور DC
سیمبندی آرمیچر در موتورهای DC، عنصر حیاتی و مهمی در ایجاد حرکت و انتقال انرژی میباشد. در سیمبندی حلقوی، دو سری سیمپیچ به دو بازوی کلاف متصل شده و سپس به طریق خاصی با هم تنظیم میشوند. در این روش، ماشین P قطبی دارای کلاف سری متصل با هم است و هر دو بازوی کلاف با یکدیگر ارتباط دارند.
سیمبندی حلقوی در موتورهای DC، با استفاده از دو بازوی کلاف و تنظیم تعداد شیارها و گام کلاف Ys، به عنوان یکی از انتخابهای بهینه در این زمینه مطرح میشود. انتهای هر سیمپیچ به یک بخش از کموتاتور متصل شده و با شروع کویل بعدی در همان قطب ادامه یافته و به بخش متناظر کموتاتور متصل میشود.
این ساختار، موتور DC را قادر به تولید حرکت دایمی و کارآمد میسازد، که از آن به عنوان یک انتخاب هوشمندانه در بسیاری از کاربردها استفاده میشود.

انواع سیم پیچی حلقوی
سیم پیچی حلقوی ساده: در سیمبندی حلقوی ساده، تعداد مسیرهای موازی بین جاروبکها با تعداد قطبها هماهنگ است. این نوع سیمبندی برای سادگی و کارایی در انتقال انرژی و ایجاد جریانهای همگن در موتور DC به کار میرود. این ساختار به موتور امکان تولید حرکتی پایدار و اثربخش را میدهد، که در بسیاری از کاربردها از آن بهرهمند میشود.

سیم پیچی حلقوی دوبل: در سیمبندی حلقوی دوبل، تعداد مسیرهای موازی بین جاروبکها دو برابر تعداد قطبها قرار دارد. این نوع سیمبندی به موتور امکان افزایش جریانهای موازی و بهبود عملکرد در تولید گشتاور و سرعت موتور را میدهد. این ساختار مناسب برای کاربردهایی است که نیاز به قدرت و کارایی بیشتری دارند و باعث افزایش کارایی و کاربرد موتور DC میشود.

سیمبندی موجی در موتور DC
چگونگی توزیع میدان مغناطیسی در فازهای مختلف در سیمبندی حلقوی موتورهای DC با دو قطب از دو دیدگاه متفاوت است. این موتورها دارای دو قطب هستند که از زوج کلافها تشکیل شدهاند. در سیمبندی حلقوی ساده، تعداد مسیرهای موازی بین جاروبکها برابر با تعداد قطبها است.
در دیدگاه دیگر، در سیمبندی موجی، دو زوج کلاف از طریق جاروبکها به هم متصل میشوند. این اتصالات میتوانند باعث جمعآوری ولتاژ القایی آنها شده و بهبود کارایی موتور گردد. به عبارت دیگر، در سیمبندی موجی، کلافهای زیر قطبهای یکسان میتوانند با سری کردن به ولتاژ القایی مشترک برسند.
از نظر اتصال انتهایی، سیمبندی موجی با اتصال سری کلافهای دور از هم و با چندین بار گردش حول آرمیچر شکل میگیرد. این روش به سیمبندی موتورها از جمله سیمبندی موجی معروف است.

دستهبندی موتورهای DC
مشخصات عملیاتی ماشینهای DC میتواند از طریق ترکیب مدار تحریک و مدار آرمیچر به شکلهای مختلف تعیین گردد. این تنوع اتصالات نقش مهمی در تعیین ویژگیهای باری این ماشینها ایفا میکند. در شکل زیر، ارتباطات متداول سیمبندی میدان نمایش داده شده است.
در بخش (الف)، جریان میدان توسط منبع خارجی که مستقل از Va است، تأمین میشود.
در بخش (ب)، جریان مدار موازی به عنوان تابعی از Va و در بخش (ج)، جریان مدار سری به عنوان تابعی از Ia عمل میکند.
در مدارهای تحریک کمپوند در بخش (د)، mmf میدان سری به میدان اصلی اضافه یا مخالفت کرده و نتیجه کمپوند اضافی یا تفاضلی را تشکیل میدهد. مشخصههای ولتاژ-جریان بار در حالت ژنراتوری و گشتاور-سرعت در حالت موتوری به طور کامل به اتصالات سیمبندی میدان وابسته است.
مدار تحریک جداگانه موتور DC

موتور DC شنت
موتورهای DC شنت، گزینهای ایدهآل برای کاربردهایی هستند که نیاز به گشتاور راهاندازی متوسط و سرعت نسبتاً ثابت دارند. این موتورها به خاطر قابلیت کنترل سرعت و تنظیم خودکارشان در شرایط مختلف، بهویژه در مواردی که نیاز به حفظ سرعت ثابت باشد، بسیار مورد استفاده قرار میگیرند.

موتور DC سری
موتورهای DC سری با گشتاور راهاندازی زیاد شناخته میشوند. ویژگی منحصربهفرد این نوع موتور این است که سرعت آن با تغییر بار نیز تغییر میکند. در مواردی که بار همیشه ثابت نمیماند ولی در محدوده وسیعی تغییر میکند، این موتورها بهعنوان یک گزینه ایدهآل برای کاربردهای مختلف مورد استفاده قرار میگیرند.

موتور DC کمپوند یا ترکیبی
موتورهای DC کمپوند یا ترکیبی به دو دسته موتور ترکیبی اضافی و موتور ترکیبی تفاضلی تقسیم میشوند. این دستهبندی نشاندهنده ویژگیهای منحصربهفرد در این نوع موتورهاست.
علامت مثبت و منفی نشانگر جهت شار تولید شده در سیمپیچهای میدان است و این ویژگی از اهمیت بسیاری برخوردار است.
موتور DC کمپوند اضافی
در این نوع موتور، شار تولید شده توسط هر دو سیم پیچ در یک جهت است. این ویژگی موجب افزایش گشتاور راهاندازی و کنترل بهتر سرعت موتور میشود، که در کاربردهایی که نیاز به پایداری در سرعت و گشتاور دارند، بسیار مفید است.
![]()
ویژگیهای موتور ترکیبی (کمپوند) اضافی
این نوع موتور با ویژگی گشتاور راهاندازی عالی برخوردار است. علاوه بر این، خصوصیت سرعت ثابت در مقایسه با موتورهای شنت (موازی) در این مدل بهبود یافته و بهتر است.
موتور DC کمپوند تفاضلی
در این موتور، شار تولید شده توسط سیم پیچهای میدان سری با شار تولید شده توسط سیم پیچ میدان شانت مخالف است.

ویژگیهای موتور DC ترکیبی (کمپوند) تفاضلی
– گشتاور راهاندازی بسیار ضعیف
– سرعت کاملاً ثابت در محدوده کوچک
این نوع موتور به دلیل گشتاور راهاندازی ضعیف و سرعت کاملاً ثابت در محدوده کوچک، کاربرد بسیار محدودی دارد و اغلب خصوصیات بهتری میتوان در موتورهای AC یافت.
کنترل دور موتور DC
موتورهای DC با انعطاف بالا در صنایع مختلف استفاده میشوند. با تنظیم اتصالات مختلف سیم پیچ میدان، میتوان خصوصیات مختلف گشتاور، سرعت و ولتاژ جریان را در این ماشینها تنظیم کرد. موتورهای DC به دلیل سرعت بالا و کاربردهای گستردهای که دارند، هنوز به عنوان یکی از اجزای اصلی در سیستمهای حمل و نقل مانند مترو استفاده میشوند. در موتورهای DC کوچک، کنترل دور موتور DC یکی از کاربردهای اساسی آنهاست.
کاربردهای اصلی کنترل کننده دور و گشتاور موتورهای الکتریکی عبارتند از انتقال انرژی از منبع به فرآیند تحت کنترل. درایوهای DC، سیستمهای کنترل سرعت برای موتورهای DC ارائه میدهند. در این موتورها، سرعت موتور به طور مستقیم با ولتاژ محرک و به طور معکوس با شار موتور (که یک تابع از جریان میدان است) مرتبط است. اما میتوان از هر دو ولتاژ و جریان میدان برای کنترل سرعت بهره برد.
عوامل مؤثر در سرعت موتور DC
– ولتاژ و جریان عبوری از سیم پیچ موتور
– بار موتور
– گشتاور موتور
کنترل دور موتور DC شنت با مقاومت آرمیچر
در دایره کنترل دور موتور DC شنت، از روش کنترل مقاومت آرمیچر استفاده میشود که در شکل زیر نمایش داده شده است. در این روش، یک مقاومت متغیر با نام Re در مدار آرمیچر اضافه میشود. تغییرات در مقدار مقاومت متغیر تأثیری بر شار ندارد، زیرا میدان به طور مستقیم به منبع تغذیه اصلی متصل است. این روش کنترل دور موتور DC شنت به کمک تنظیم مقاومت آرمیچر، کنترل دقیقی بر روی سرعت موتور فراهم میکند.

نمودار مشخصه سرعت – جریان موتور شنت DC در این حالت، در نمودار زیر به تفصیل آورده شده است.

کنترل دور موتور DC سری با مقاومت آرمیچر
در اینجا، مدار کنترل سرعت موتور DC سری با استفاده از روش کنترل مقاومت آرمیچر به دقت بررسی شده است.

تغییرات در مقاومت مدار آرمیچر، تأثیرات گستردهای بر جریان و شار موتور دارد. کاهش ولتاژ آرمیچر ناشی از افت ولتاژ در مقاومت متغیر، به کاهش سرعت موتور منجر میشود. نمودار مشخصه سرعت – جریان موتور DC سری در این شرایط، در شکل زیر به دقت نمایش داده شده است.

هنگامی که مقدار مقاومت متغیر Re افزایش مییابد، سرعت موتور کاهش مییابد.
معایب کنترل دور موتور DC به روش کنترل مقاومت آرمیچر
مشکلات متعددی در استفاده از روش کنترل مقاومت آرمیچر برای کنترل دور موتور DC وجود دارد. یکی از این مشکلات، اتلاف توان قابل توجه در مقاومت خارجی Re است که باعث کاهش کارایی کل موتور میشود.
در این روش، کنترل مقاومت آرمیچر به گونهای است که توانایی افزایش سرعت موتور به حدود بالاتر از حد معمول را ندارد و سرعت را به سطوح پایینتری محدود میکند. به عبارت دیگر، این روش نمیتواند سرعت موتور را به طور موثر به سطوح بالاتری ارتقاء دهد.
در مقایسه با دیگر روشهای کنترل سرعت، این روش برای مقادیر معین مقاومت متغیر، تنها مناسب برای موتورهای کوچک است و در مواردی که نیاز به کنترل دقیق و گستردهتر بر روی سرعت موتور وجود دارد، کاربرد محدودی دارد.
کنترل دور موتور DC به وسیله کنترل شار میدان
با استفاده از کنترل شار میدان، میتوان به طور مستقیم بر روی سرعت موتور DC تأثیر گذاشت. در این روش، شار میدان توسط جریان میدان تولید میشود و از طریق کنترل این جریان میتوان به کنترل دور موتور پرداخت.
در موتور DC شنت، مقاومت متغیر Rc به صورت سری با سیمپیچهای میدان اتصال داده میشود. این اتصال به این صورت است که افزایش یا کاهش مقاومت متغیر Rc تأثیر مستقیمی بر روی شار میدان و در نهایت سرعت موتور خواهد داشت. این روش امکان کنترل دقیقتر و پایدارتری بر روی سرعت موتور را فراهم میکند و از این جهت مورد استفاده گستردهتری قرار گرفته است.

جریان شنت در این حالت از فرمول زیر به دست می آید:

اتصال مقاومت Rc باعث کاهش جریان میدان میشود، در نتیجه شار نیز کاهش پیدا میکند. این کاهش در شار، منجر به افزایش سرعت موتور میشود. با این روش، موتور قادر به اجرای عملکرد با سرعتی بالاتر از حالت نرمال است، ایدهآل برای افزایش سرعت یا اصلاح افت سرعت ناشی از بار.
نمودار مشخصه سرعت – گشتاور برای موتور DC شنت در شکل زیر به وضوح نشان داده شده است، که نمایانگر رفتار این موتور در تابع زمان و بار مختلف است.

کنترل موتور DC سری از طریق کنترل شار میدان
در موتور DC سری، افزایش یا کاهش جریان میدان از طریق راهکارهای متنوعی انجام میشود. از راهکارهایی نظیر استفاده از دایودها یا روش کنترل میدان ضربهای (Tapped Field Control) برای تنظیم جریان میدان بهره گرفته میشود.
کنترل موتور DC سری با استفاده از دایورتر
ایجاد یک مقاومت متغیر به نام Rd که به صورت موازی با سیم پیچهای سری موتور قرار میگیرد، یک رویکرد تازه برای کنترل موتور DC سری میباشد.

استفاده از Diverter یک راهکار پیشرفته در کنترل دور موتور DC سری است. این دستگاه، که همچنین به نام مقاومت موازی Rd شناخته میشود، جریان اصلی را از طریق یک مسیر جداگانه به مقدار قابل تنظیمی هدایت میکند. این عمل باعث کاهش جریان در سیم پیچ میدان و در نتیجه افزایش سرعت موتور میگردد.
روش کنترل میدان ضربه ای
در این حالت کنترل دور موتور DC سری با تغییر شار میدان، تأثیر بسیار مستقیم و مؤثری بر روی جریان موتور دارد. با تغییر مقدار شار میدان، جریان نیز تغییر میکند و در نتیجه نمودار مشخصه سرعت – گشتاور موتور DC سری در شکل زیر به وضوح قابل مشاهده است.


مزایای کنترل دور موتور DC از طریق کنترل شار میدان
کنترل دور موتور DC از طریق کنترل شار میدان دارای مزایایی است که آن را به یک روش موثر و آسان تبدیل کرده است. به علت کوچک بودن میدان شنت، اتلاف توان در این قسمت معمولاً به حداقل میرسد. همچنین، شار معمولاً نمیتواند فراتر از حد نرمال افزایش یابد، که به این ترتیب کنترل سرعت از طریق محدود کردن شار، منجر به افزایش سرعت میشود. این روش به خوبی در محدودهای از عملکرد مورد استفاده قرار میگیرد، اما باید توجه داشت که اگر میدان به میزان زیادی تضعیف شود، پایداری سیستم ممکن است به خطر بیافتد.
روش کنترل دور موتور DC به وسیله PWM
سادهترین روش برای کنترل سرعت موتور DC استفاده از مقاومت متغیر یا رئوستا میباشد، اما یکی از راهکارهای پرکاربرد در کنترل دور موتور DC، استفاده از مدولاسیون عرض پالس (PWM) است. در این روش، که به اختصار PWM نیز شناخته میشود، از یک روش مؤثر برای کنترل توان استفاده میشود که در آن مقدار توان اعمالی به بار به دوره کاری سیکل وظیفه یا Duty cycle بستگی دارد.
در روش کنترل موتور با استفاده از PWM، یک فرکانس مناسب و ثابت انتخاب شده و در صورت نیاز به افزایش سرعت موتور، دوره کاری یا همان Duty cycle را افزایش میدهیم؛ و در صورت نیاز به کاهش سرعت موتور، دوره کاری را کاهش میدهیم. لازم به ذکر است که دوره کاری یا سیکل وظیفه در موتورهای الکتریکی معمولاً کمتر از ۱۰۰% است.
کنترل دور موتور DC با درایو
کنترل دور موتور DC از طریق درایور اختصاصی برای موتور DC اجرا میشود. انتخاب یک درایور DC مناسب به عواملی نظیر رنج ولتاژ درایور، جریان نامی، و لحظهای بستگی دارد.
جمع بندی
در مقالات مورد بررسی، به تفصیل به روشهای مختلف کنترل دور موتورهای DC پرداختیم. این شامل کنترل شار میدان، کنترل مقاومت آرمیچر، و استفاده از مدولاسیون عرض پالس (PWM) برای بهبود عملکرد و کارایی موتورها بود. هر یک از این روشها دارای ویژگیها و مزایاست که متناسب با نیازهای اپلیکیشنهای مختلف قابل اعمال هستند.
همچنین، اهمیت انتخاب درایور های مناسب برای این موتورها و نحوه تاثیرگذاری آن در عملکرد نیز مورد بررسی قرار گرفت. این مقالات به خواننده اطلاعات جامعی ارائه دادهاند تا بتوانند با دانش فنی بهتری، راهحلهای بهینه برای کنترل دور موتورهای DC را انتخاب کنند.